For the Power Play Season, we designed a small robot and a pass-through system to rapidly cycle between the human player station and a junction. We opted to use mecanum drive with a custom drivetrain after successful testing with it during the offseason.

CHASIS:

Over the offseason, we experimented with custom drive plates for an indirect mecanum drivetrain that we ordered from SendCutSend. We had incredible success with the maneuverability and customizability, so we decided to use this approach for this season.
We decided to mount our electronics on the side of the robot, with a small area for wires to pass through the robot. We then covered that with a 3D-printed shell with aesthetic plates. In the past we have experienced inconsistencies with individual wheels’ speeds, so we added belt tensioners to ensure they run at the same speed.

ELEVATOR:
We considered both a turret and a double reverse four-bar, but we decided to use drawer slides for vertical extension since we had previous experience with them. We knew that there were several options drawer slides, but the BWTLink slides with integrated pulley blocks ended up being our choice of linear slide. We have two sides, with each having three slides being powered independently.
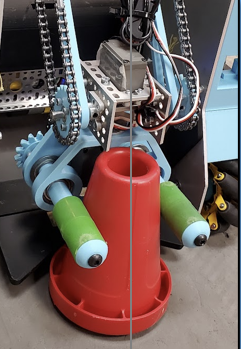
GRABBER:
We decided to have the wheels pointing outward so that we could easily grab cones that are pushed against the wall like the 5-stack. We also wanted to mount our grabber/intake to a rotator servo to allow for a passthrough system.
PROGRAMMING:
For our autonomous we use a finite state machine. This is a state machine that runs in a loop with a finite number of states. Each state is associated with a Roadrunner trajectory and has logic on which state should be next.
